Video-Based Runtime Validation of Localization / App. Ex. 1
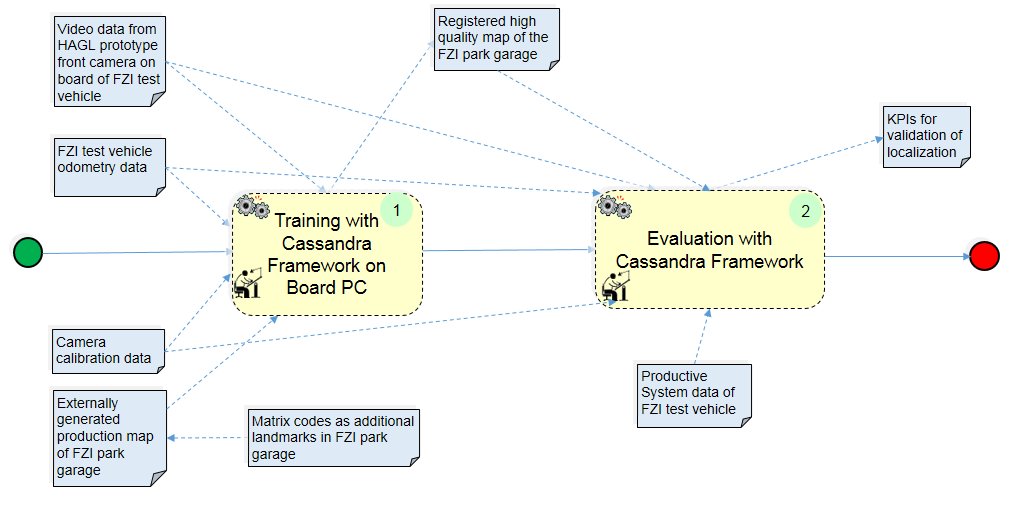
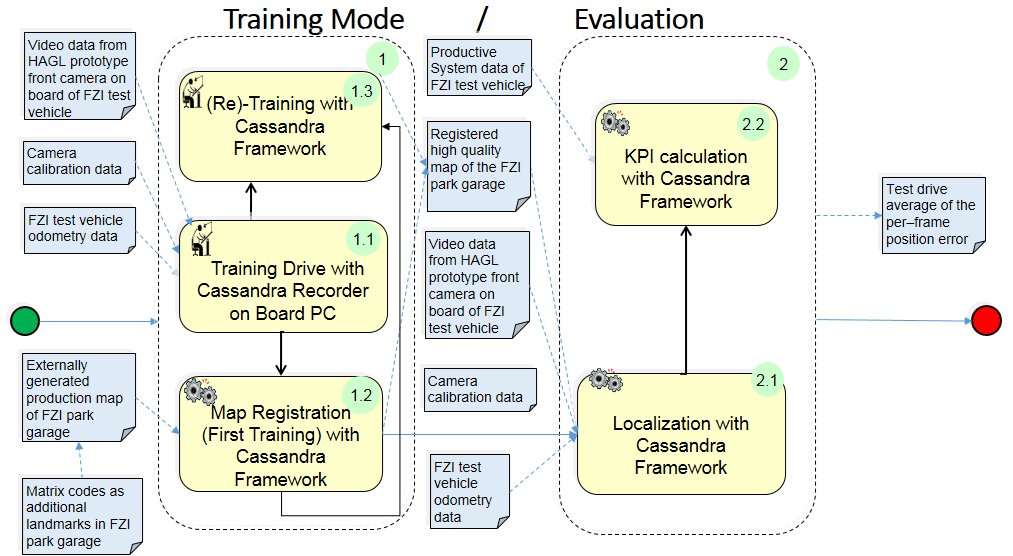
ENABLE-S3 / Use Case 6 “Valet Parking”: The pattern was applied for the runtime validation of the localization component in the use case Valet Parking.
* The application of the pattern for this use case will be indoor for the test track FZI parking house in Karlsruhe.
* The visual based localization method will be applied simultaneously with a lidar based localization method and a Blue-Tooth based localization method an the results compared.
* The accuracy for the actual mono camera based system is about 10 cm.
The following diagrams instantiate the pattern structure for this use case.